Robot được lập trình trên vi điều khiển 89c2051, cầu H sử dụng LM293D và 4 sensor phát hiện vạch đen. Chương trình được viết bằng ngôn ngưc C dễ hiểu.
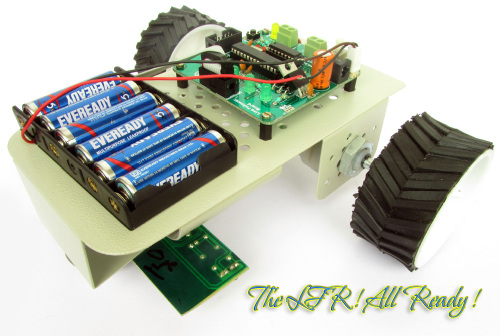
Line robot được thiết kế khá đơn giản, gồm 2 motor điều khiển 2 bánh xe phía sau, có một bánh xe phía trước - nó được để tự do và các cảm biến để phát hiện vạch đen. Khi một cảm biến phát hiện được vạch màu đen, ngõ ra của mạch so sánh có mức logic thấp, các ngõ ra khác có mức logic cao.
Vi điều khiển 89c2051 và cầu H LM293D điều khiển hướng và tốc độ của motor.
Sơ đồ nguyên lí của Line follower robot:
Như vậy, với hình ảnh tổng quan ở trên cùng với các sơ đồ khối chi tiết, bạn có thể tự mình làm một robot cho mình. Đến đây, bạn mới có phần cứng của một line follower robot. Sau đây, bạn tải chương trình về và nạp cho vi điều khiển 89c2051 là sẽ có một line robot hoàn chỉnh.
|| Tải chương trình (c + hex)
 |
| Line follower robot - Ảnh: http://chaokhun.kmitl.ac.th/~kswichit |
Vi điều khiển 89c2051 và cầu H LM293D điều khiển hướng và tốc độ của motor.
 |
| Sơ đồ nguyên lý line follower robot - Ảnh: http://chaokhun.kmitl.ac.th/~kswichit |
- Sơ đồ nguyên lý của khối IR sensor
 |
| Sơ đồ nguyên lý khối IR - Ảnh: http://chaokhun.kmitl.ac.th/~kswichit |
- Sơ đố lắp đặt các IR sensor:
 |
| Sơ đồ lắp đặt IR sensor - Ảnh: http://chaokhun.kmitl.ac.th/~kswichit |
|| Tải chương trình (c + hex)
























 Anonymous on
Anonymous on 
 Facebook
Facebook Twitter
Twitter Google+
Google+ Rss Feed
Rss Feed
 ๖ۣۜTài ๖ۣۜliệu ๖ۣۜmiễn ๖ۣۜphí
๖ۣۜTài ๖ۣۜliệu ๖ۣۜmiễn ๖ۣۜphí
 Trung tâm Gia Sư Huế
Trung tâm Gia Sư Huế Download Sách - Luận Văn Miễn Phí
Download Sách - Luận Văn Miễn Phí Đồ họa 360
Đồ họa 360




0 nhận xét: